Link za više informacija:
Ćosić M., Folić B., Folić R.: Developing a Methodology for the Integrated Numerical Evaluation and Performance Assessment of Soil-Pile Pier, The 13th International Science Conference VSU, Sofia, Bulgaria, 2013. pp. II-236-244.
Metodologija za integrisanu numeričku evaluaciju stanja i seizmičkih performansi tlo-šip-stub mosta (SPP) bazira je na interakciji većeg broja različitih metoda, a koje se izvršavaju primenom metode konačnih elemenata (FEM). Na slici 1 je prikazan dijagram toka razvijene metodologije. Iniciranje razvijene metodologije izvršava se razmatranjem domena koji participiraju u analizi sistema. U ovoj fazi se identifikuju ključni fizički domeni, kao što su domen konstrukcije, domen šipova i domen tla, a ovako identifikovani domeni predstavljaju osnovu za fazu numeričkog modeliranja. U ovoj fazi se vrši apstrakcija i diskretizacija fizičkog modela, pri čemu se pod apstrakcijom podrazumeva aspekat prevođenja iz fizičkog i numerički model, dok se pod diskretizacijom podrazumeva aspekt formiranja sistema odnosno mreže konačnih elemenata.

Slika 1. Dijagram toka metodologije za numeričku evaluaciju neregularnosti i procenu seizmičkih performansi SPP sistema
Domen konstrukcije se modelira linijskim ili površinskim konačnim elementima, dok se domen šipova modelira linijskim ili prostornim konačnim elementima. U zavisnosti od toga kako se domen tla modelira postoje generalno dva pristupa: direktno (eksplicitno) numeričko modeliranje konačnim elementima i indirektno (implicitno) modeliranje zamenjujućim elementima (zamenjujuće opruge i elementi za prigušenje). S obzirom da modeliranje domena tla solid konačnim elementima zahteva velike hardverske resurse, kada je domen tla znatnih dimenzija i kada je broj solid konačnih elemenata veliki, tada je prihvatljivije preći sa 3D modeliranja na 2D modeliranje ili implicitno modeliranje. Kao druga opcija preostaje primena tehnike paralelnog procesiranja. Nakon geometrijskog i numeričkog modeliranja dodatno se analizira model i sprovodi korekcija u cilju poboljšanja SPP modela, mreže konačnih elemenata, konturnih i prelaznih uslova, i slično. Kao što je već rečeno razvijena metodologija se bazira na oceni ponašanja sistema preko tri različite procedure.
U prvom delu numeričko modeliranje za šipa (šipova) se sprovodi primenom 3D solid konačnih elemenata, s’tim što se i dodatno uvodi korekcija modeliranjem diskontinuiteta, defekata, neregularnosti i oštećenja u šipu. Generalni pristup u modeliranju defekata i oštećenja kod šipa je primena principa eliminacije određenih solid konačnih elemenata i redukcije poprečnog preseka šipa, posebno u zoni baze (nožice) šipa. Modeliranje oštećenja na nivou materijala, a ne geometrije, se sprovodi redukcijom nivoa modula elastičnosti šipova u određenoj zoni. Na slici 2 su prikazani diskretni numerički modeli šipa sa defektima i oštećenjima. Interakcija šip-tlo se realizuje primenom implicitnog principa modeliranje zamenjujućim elementima. U narednoj fazi se sprovodi test integriteta šipa (SIT) simulacijom propagacije talasa u šipu i analizom numeričke integracije korak po korak Hilber-Hughes-Taylor-ovim (HHT) postupkom u vremenskom domenu (THA). SIT test šipa se zasniva na jednodimenzionalnoj teoriji propagacije talasa.
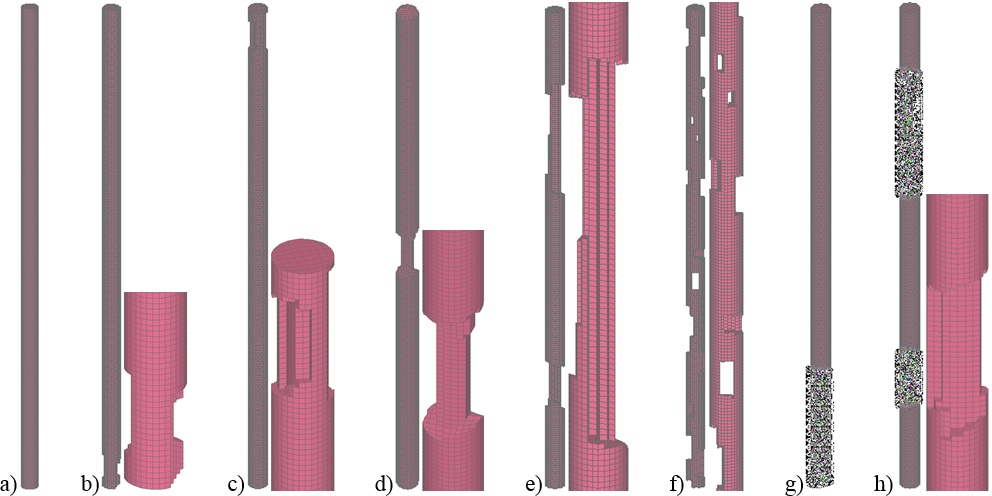
Slika 2. Numerički modeli šipova: a) model 1 – bez diskontinuiteta i defekata, b) model 2 – asimetričan defekat baze (nožice) šipa, c) model 3 – asimetrična redukcija poprečnog preseka na dva mesta duž šipa, d) model 4 – šip znatno degradiran celom dužinom, e) model 5 – redukovan modul elastičnosti u zoni baze šipa, f) model 6 – različit modul elastičnosti i asimetrična redukcija poprečnog preseka na dva mesta duž šipa
Ukupno vreme propagacije talasa kroz šip meri se od momenta iniciranja spoljašnjom pobudom, propagacije kroz šip, refleksije u bazi i povratka do glave šipa. Zapis promene propagacije talasa kroz šip u vremenu prezentuje se preko reflektograma. Refleksija talasa generisana promenom impedance (diskontinuitet) propagira do glave šipa, gde se na reflektogramu beleže ovakve promene. Promene na reflektogramu se javljaju usled promene u bazi šipa, promene u prečniku šipa duž omotača šipa, delimičnom inkluzijom tla u domen šipa, prslinama, varijacijom u kvalitetu materijala šipa, varijacijom slojeva tla i uticajem armaturnog čelika u šipu (jako armirani šip). Takođe, u ovoj fazi se sprovodi i analiza u frekventnom domenu (FDA).
Razmatranje odgovora sistema kod nedestruktivne metode sprovodi se integracijom individualnih reflektograma u površ reflektograma, a koja je generisana u 3D cilindričnom koordinatnom sistemu. Na slici 3 su prikazani reflektogrami za 12 mernih mesta, generisana 3D površ reflektograma i generisana 3D površ Fourier-ovog amplitudnog spektra (FAS) za šip znatno degradiran celom dužinom (model 4). Procena stanja šipa sprovodi se na osnovu analize površi reflektograma identifikujući mesta i nivo diskontinuiteta, defekata, neregularnosti i oštećenja.


Slika 3. Numerički model šipa 4 – šip znatno degradiran celom dužinom: reflektogrami (gore), i 3D površ reflektograma (dole)
U drugom delu nelinearni odgovor sistema se razmatra primenom inkrementalno-iterativne Newton-Raphson-ove metode kontrolom inkrementalnog priraštaja opterećenja. Razmatranje nosivosti i deformacija šipa u tlu primenom linijskog modela i u slučaju razvoja geometrijske i materijalne nelinearnosti sa dodatkom materijalno nelinearnog ponašanja tla, a indirektno prezentovanog preko opruga prikazano je na slici 4a. U ovom slučaju geomehanički model tla je prikazan kao trokomponentalni elastoplastičan. Na slici 4b je prikazan šip u inkrementalnim ravnotežnim konfiguracijama: početna, tekuća i naredna. Proračun konačnog ravnotežnog stanja se sprovodi primenom korigovane ili totalne formulacije.

Slika 4. a) model šipa u realnim uslovima i numerički model formiran iz linijskih konačnih elemenata, b) početna, tekuća i naredna inkrementalna konfiguracija šipa
Inkrementalno-iterativna metoda omogućava inkrementalni priraštaj opterećenja i analizu statičkih uticaja u šipu i reakcije tla. Opterećenje se deli na određeni broj inkremenata pri čemu parametru 0 odgovara neopterećeno stanje sistema, a parametru 1 odgovara opterećenje od 100% gde je dostignuta vrednost maksimalnog broja inkremenata. Parametar opterećenja je podeljen na deset delova preko kojih se prati raspodela statičkih uticaja u šipu. Na slici 5 je prikazana je horizontalna komponenta pomeranja šipa Uh i momenat savijanja M za različite parametre opterećenja na određenim dubinama z.

Slika 5. Horizontalna pomeranja šipa Uh i momenti savijanja M na određenim dubinama z u zavisnosti od parametra opterećenja
Analiza šipa usled dejstva momenta, horizontalne i vertikalne sile u uslovima nelinearnog ponašanja tla izvršena je primenom inkrementalno-iterativnog postupka. Prvo je izvršena linearna statička analiza ne uzimajući u obzir nelinearne parametre za šip i tlo. Zatim je izvršna nelinearna analiza pri čemu se uzima u obzir samo razvoj materijalne nelinearnosti i na kraju je izvršena analiza uzimajući u obzir i razvoj geometrijske nelinearnosti. Kao komparacija tri različite analize prikazani su dijagrami horizontalne deformacije šipa (slika 6a), dijagrami transverzalne sile duž šipa (slika 6b) i dijagrami momenta savijanja duž šipa (slika 6c). Komparacijom nelinearnih modela evidentno je da horizontalno pomeranje daje zadovoljavajuće slaganje rezultata, gde na mestu apliciranja opterećenja razlika iznosi 10%, dok se u donjim slojevima tla ova razlika smanjuje. Razlika komponente horizontalnog pomeranja nelinearnih analiza i linearne analize na mestu apliciranja opterećenja iznosi i do 450%. Ovako velika razlika pomeranja posledica je razvoja geometrijske i materijalne nelinearnosti koje se uzimaju u obzir kod modela šipa u uslovima nelinearnog ponašanja tla. Kod linearnog modela maksimalna vrednost transverzalne sile je na dubini z=2m, dok je kod nelinearnih modela maksimalna transverzalna sila na dubini z=5m. Apsolutne maksimalne vrednosti transverzalne sile za model sa nelinearnim ponašanjem su veće u odnosu na linearan model. Maksimalna vrednost momenta savijanja primenom linearne analize se dostiže na dubini z=0.5m, gde pri daljem povećanju dubine nastupa redukcija momenta savijanja, tako da pri dubini većoj od polovine dužine šipa momenat menja znak. Kod nelinearne analize za parametar opterećenja 1 znak momenta savijanja je konstantan sa dubinom.
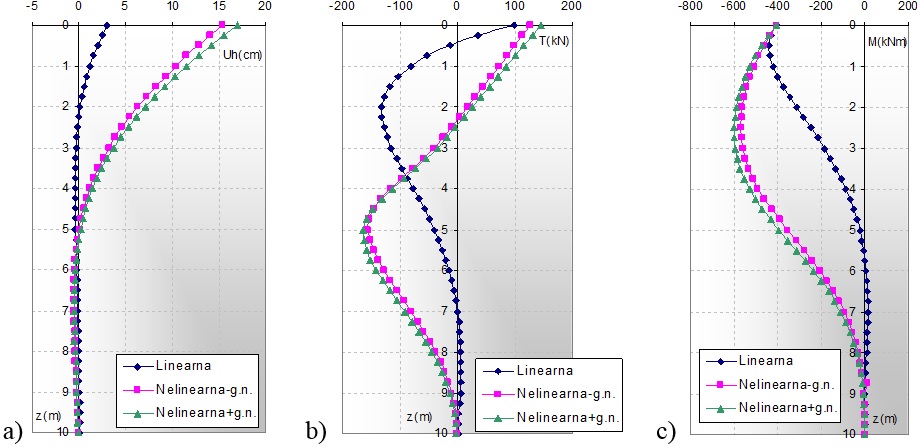
Slika 6. a) horizontalna deformacija, b) transverzalna sila, c) momenat savijanja
Analiza stabilnosti SPP sistema se sprovodi prema modifikovanoj geometrijski nelinearnoj analizi stabilnosti. Diskretizacija domena tla i šipa sprovodi se primenom 3D solid konačnih elemenata, dok se u slučaju razmatranja pojedinačnog šipa primenjuje rotaciono simetričan tretman u geometrijskom modeliranju. Medijum u kojem se nalazi šip može biti veoma različitog karaktera, od jednoslojne do višeslojne sredine sa različitim geomehaničkim karaketeristikama. Numerički tretman interfejs zone sprovodi se primenom specijalnih čvornih linijskih konačnih elemenata, odnosno primenom kontaktnih elemenata kod koga se definišu posebna svojstva krutosti pri pritisku, a eliminišu naponi zatezanja. Konekcija šip-tlo se uspostavlja preko čvorova solid elemenata tla i solid elemenata šipa, pri čemu je kompatibilnost čvorova ključni uslov u generisanju mreže konačnih elemenata. Kontaktni element se koristi za modeliranje dodira dve tačke modela, a koga karakterišu dva stanja: aktivno (kontakt je uspostavljen, veoma velika krutost) i neaktivno (kontakt nije uspostavljen, veoma mala krutost). Primenjujući kontaktne elemente u modeliranju prelazne zone šip-tlo, potrebno je primeniti i geometrijski nelinearnu inkrementalno-iterativnu analizu. U drugoj fazi proračuna sprovodi se analiza stabilnosti tlo-šip-konstrukcija sa matricom krutosti iz prethodne geometrijski nelinearne inkrementalno-iterativne analize. Prema prethodno opisanoj proceduri, kao rezultat razvoja geometrijske nelinearnosti sistema i nelinearnosti u elementima veze iz prve analize, dobijaja se korigovana elastična matrica krutosti sistema i korigovana geometrijska matrica krutosti sistema. Na slici 7a je prikazan vertikalan presek 3D modela tlo-šip-naglavna ploča formiran od solid konačnih elemenata, dok je na slici 7b prikazan detalj veze tlo-šip i zona prelaznih konačnih elemenata. Na slici 8a je prikazan karakterističan prvi oblik izvijanja za L/d=50 i KR=10-6 dvoslojnog sistema, gde je KR=EpIp/EsL4. Oblik izvijenih šipova je formiran iz većeg broja polutalasa, a ne iz jednog uobičajenog sinusnog polutalasa. Ovo je posledica toga što je, u konkretnom slučaju, vrednost krutosti KR veoma niska, tako da je samo 2/3 šipa izloženo izvijanju. Usled veoma niske vrednosti krutosti KR šip prenosi opterećenje i bazom i omotačem.

Slika 7. 3D model tlo-šip-naglavna ploča formiran od solid konačnih elemenata: a) vertikalni presek, b) detalj veze tlo-šip i zona prelaznih konačnih elemenata
Na slici 8b je prikazan karakterističan prvi oblik izvijanja za L/d=50 i KR=10-4 dvoslojnog sistema. U odnosu na prethodnu situaciju razvijena je forma izvijanja šipa u obliku sinusnog polutalasa, tako da usled niže vrednosti krutosti KR šip prenosi opterećenje dominantno bazom, a manje omotačem. Određivanje nivoa kritične sile izvijanja Pcr/PE i koeficijenta dužine izvijanja β šipa sprovodi se na osnovu numeričkih rešenja, a takođe i primenom regresionih analiza za stepenu funkciju, gde su u prikazani izvedeni koeficijenti dužine izvijanja šipova za dvoslojni i jednoslojnu sredinu u funkciji dužine šipa, krutosti šipa i krutosti tla.

Slika 8. Prvi oblik izvijanja za dvoslojni sistem L/d=50: a) KR=10-6, b) KR=10-4
U trećem delu se sprovodi procedura evaluacije seizmičkih performansi pri nelinearnom odgovoru SPP sistema, a primenom nelinearne statičke pushover analize (NSPA – nonlinear static pushover analysis) i inkrementalne nelinearne dinamičke analize (INDA). Prethodno se ulazni signal u sistemu tretira za realne i generisane veštačke akcelerograme, a koji su dodatno procesirani po slojevima tla do osnovne stene. Šip i stub se modeliraju primenom linijskih konačnih elemenata, a efekti koje reprezentuju uticaj tla uvode se primenom principa implicitnog modeliranja nelinearne dinamičke interakcije šip-tlo (slika 9). Liniski konačni elementi zasnovani su na principu propagacije nelinearnih deformacija duž elementa, gde se na nivou poprečnog preseka sprovodi posebna diskretizacija na vlakna. Generalno razmatrajući poprečni presek se razmatra preko tri poddomena: vlakna neutegnutog betona, vlakna utegnutog betonskog jezgra i vlakna armature. Modeliranje nelinearne dinamičke interakcije tlo-šip sprovodi se primenom konstitutivnog modela ponašanja za lateralnu analizu kod šipova, gde se uzima u obzir i formiranje otvora pri cikličnoj deformaciji tla.

Slika 9. a) realan model šipa u tlu, stuba mosta i tla, b) numerički model šipa, stuba mosta i implicitno modeliranje uticaja tla
Postprocesiranje INDA analiza izvršava se prema globalnom driftu DR i odgovarajućim vrednostima PGA, tako da se konstruišu krive PGA=f(DR) u kapacitativnom domenu (slika 10). Zatim se određuju granična stanja sistema šip-tlo razmatranjem performansnih nivoa (SPL): trenutna useljivost (IO), sprečavanje kolapsa (CP) i globalna dinamička nestabilnost sistema (GIy). Krive povredljivosti se konstruišu na osnovu rešenja regresione analize i teorije verovatnoće log-normalne raspodele, dok se krive pouzdanosti konstruišu na osnovu rešenja analize povredljivosti.

Slika 10. Krive PGA=f(DR) za glavu šipa: a) prva grupa akcelerograma ts,i=2s, ts,f=10s, tacc=20s, b) druga grupa akcelerograma ts,i=2s, ts,f=15s, tacc=40s
Link za više informacija:
Ćosić M., Folić B., Folić R.: Developing a Methodology for the Integrated Numerical Evaluation and Performance Assessment of Soil-Pile Pier, The 13th International Science Conference VSU, Sofia, Bulgaria, 2013. pp. II-236-244.